Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!

Z激光雷达的参数指标固然重要,但这只是激光雷达性能的“基本功”,在复杂交通驾驶场景中,存在诸如高反物体、近处障碍物、阳光照射、多雷达对射等极端工况,这会对激光雷达点云成像带来一连串的异常,直接使后期感知软件产生误判,进而导致事故。RoboSense称这类工况为激光雷达硬件的“Corner Case”,如何系统性识别并解决这些极端工况的困扰,这考验了激光雷达厂商产品性能的“上乘功夫”。
作为专注于激光雷达领域的“老兵”,RoboSense多年来就机械式的激光雷达与大量客户进行了交流。六年来,RoboSense积累了各种商业化路测场景,通过大面积分析和系统转化,研发了一系列解决此类问题的专利技术并成功导入固态车规级产品。以M1为例,RoboSense极力从产品侧消除业界棘手的难题,保障点云数据的安全可靠性。
高反“鬼影”和 “膨胀”
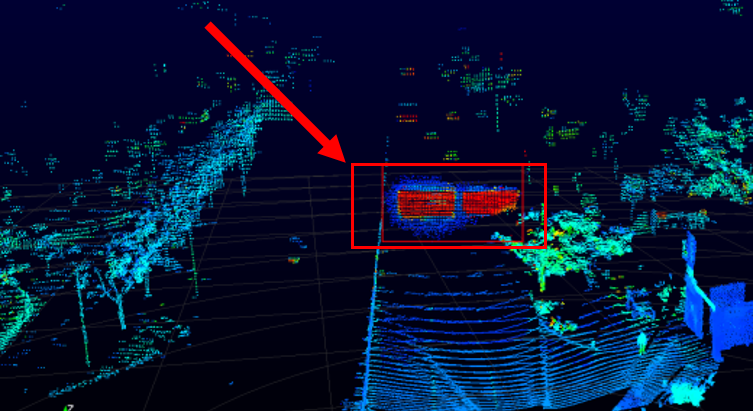
在实际驾驶场景,高反射率物体十分常见,比如交通指示牌,激光雷达对其反射回来的高强度回波非常敏感,容易在点云中形成“鬼影”和“膨胀”。
当一个真实高反物体进入激光雷达视场的任一区域时,输出的点云除了在该高反真实位置有成像以外还可能在其他方位也会成像一个形状大小类似“鬼影”。在不同场景中,不同类型激光雷达“鬼影”的行踪可能各不相同。

△有“鬼影”的异常点云

△ SOP版M1在面对高反路牌输出的正常点云
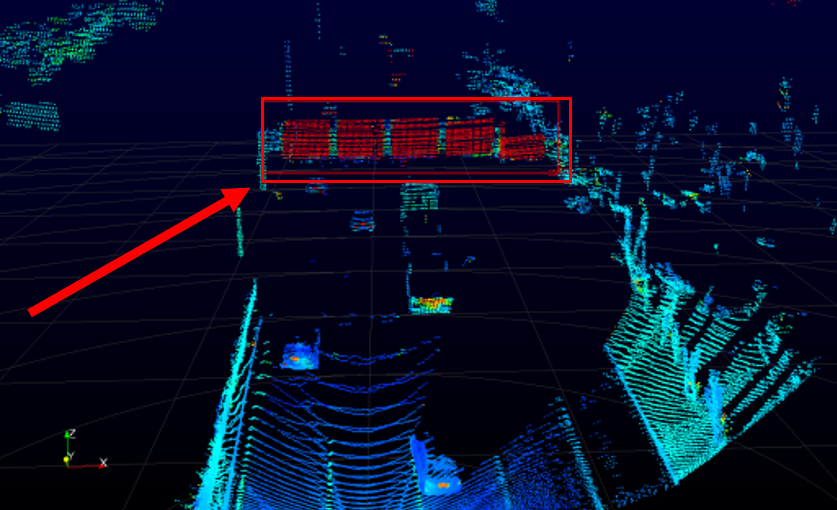
“膨胀”现象通常表现为一个正常高反指示牌的点云轮廓会向四周扩散,成像出来一个比真实物体更大的点云形状,且多出来的点云部分的反射强度表现会偏低。
△高反路牌明显膨胀的点云
△SOP版M1高反路牌点云干净利落
“吸点”和“空洞”
近场障碍物的探测能力在智能驾驶中的用处也非常明显,比如在拥堵跟车(TJP)功能中,激光雷达的最近探测距离值越小,跟车距离可以越缩短,被加塞的可能性就越小。
然而,中长距激光雷达探测近距离物体时出现的“吸点”(测距不准)和“空洞”(测不到)现象一直困扰着行业,在出现以上两类问题的小区域通常会被设定为“盲区”,输出的点云数据不建议使用。
△近距离障碍物出现吸点现象的点云
M1通过光学系统与测距系统的优化,将盲区缩减到0.5米,对于前车车牌之类的高反射率物体,盲区更是减少到0.3米,帮助智能驾驶系统合理控制与前方车辆或其他障碍物的距离。
△SOP版M1准确探测近距离障碍物
从以上两个点云图对比还可以看出,SOP版M1测距精度高,地面点与墙面点平整且纤薄,实际测评中,SOP版M1的测距精度达到±3cm(1sigma),可以精确地描绘环境物体的轮廓。
“空洞”描述的是激光雷达对于近场低矮障碍物的探测在从远到近过程中“时有时无”的丢失现象。障碍物原始点云“时有时无”会让感知软件难以连续跟踪,这容易导致智能驾驶的急刹车或频繁“减速加速”顿挫。
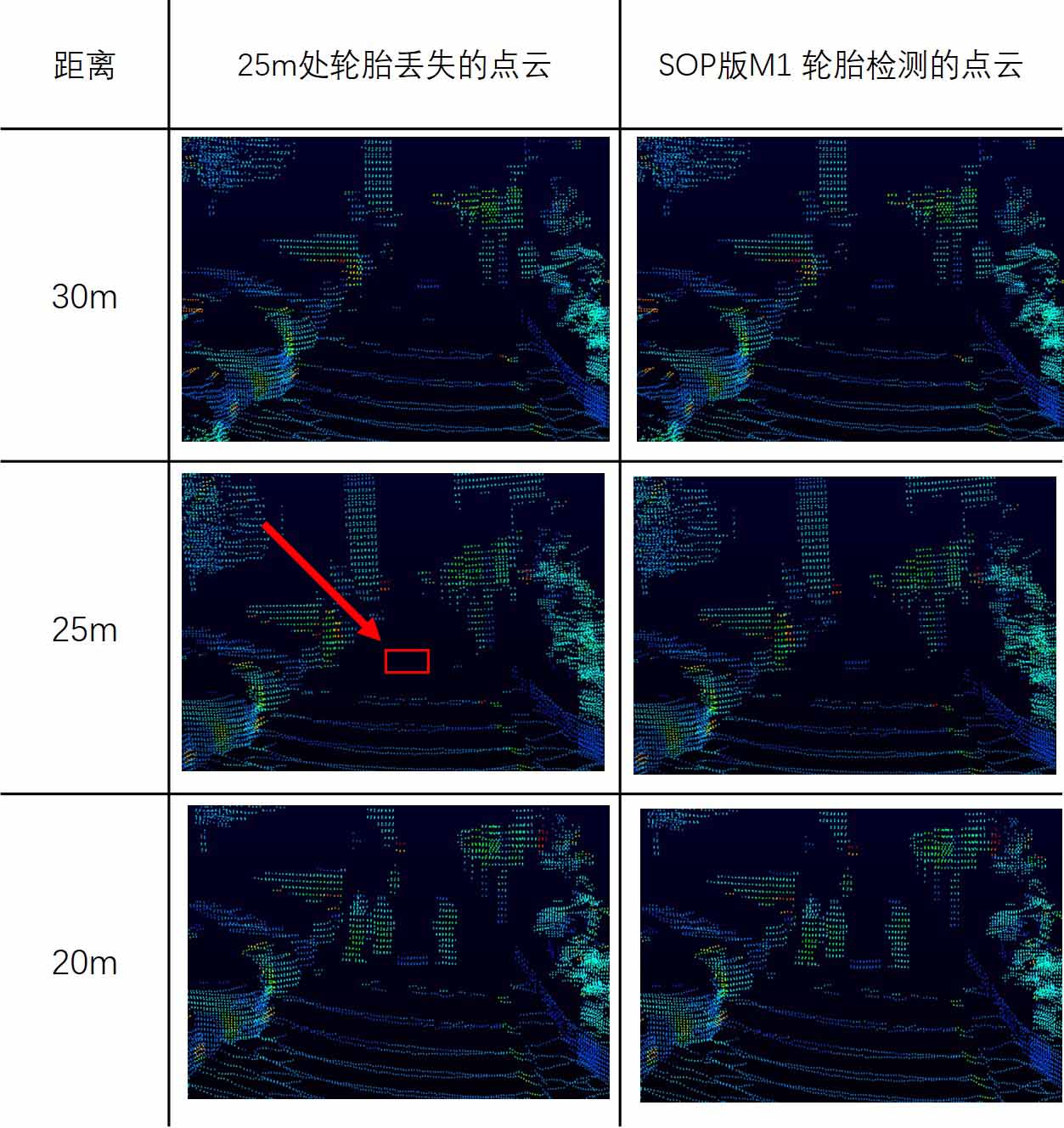
△对近场区域倒在地面的轮胎检测,左边点云出现“空洞”在25m处丢失,右边SOP版M1在不同距离下准确检出
太阳光干扰
强烈的太阳光照射是激光雷达环境光干扰源中的重大影响因子,当车辆面向太阳方向行驶的时候且激光雷达视窗也朝向阳光方向,如果处理缺乏经验,会导致激光雷达点云中出现明显噪点。
RoboSense根据整车安装位置和系统功能,采取了更优的处理策略和光学设计,使得M1能区分环境光和激光雷达的发射光,无惧环境光干扰,极大降低了强烈的太阳光照射干扰。
△SOP版M1视窗朝向阳光方向采集的点云,纯正无噪点
对射干扰
当激光雷达相互之间靠得太近,不同雷达发射和接受脉冲容易被混淆,导致点云出现噪点。针对这种情况,M1采用了独特的激光编码加密技术,过滤其他激光雷达脉冲,实现抗多雷达对射干扰。
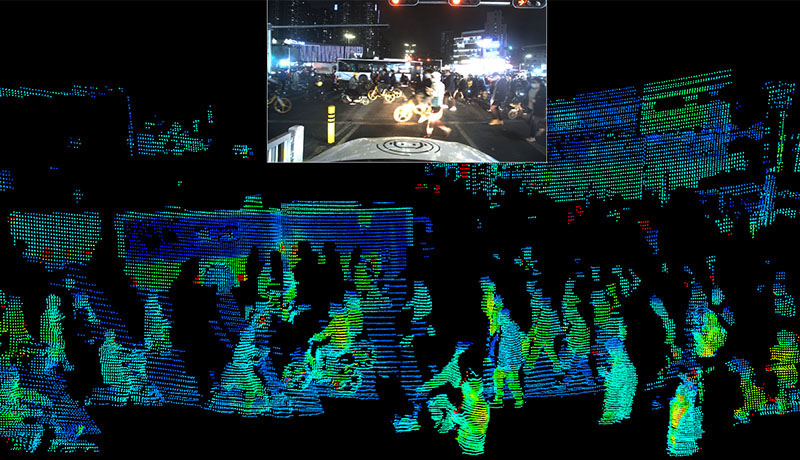
△左边大屏幕显示抗对射干扰的SOP版M1实时点云, 右边屏幕没有抗干扰的实时点云
点云质量锁定:参数指标优异
点云质量过硬的同时,测距方面,M1的最远探测可达200m,150m@10%反射率,可以准确稳定识别处于150米外的黑色车辆(车牌与车灯同时用黑布盖住)。M1的近场探测能力同样出 色,即使是0.3米处的高反物体也能有效探测。
M1强大的测距能力,结合平均0.2°x0.2°分辨率,探测前方150米处的小轿车,依然可以获得“4根线13个点”的成像,远大于感知软件所需“2根线3个点”的检测阈值。同时,M1支持双回波功能,每秒最大出点数高达1,500,000点。
目前,M1的测距能力、测距精度、视场角、盲区等基础性能的出厂检测指标已对齐车企标准并完全锁定,量产产品均按照以上性能指标批量出货。
 深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋
深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830



反舞弊举报邮箱:
voice@robosense.cn