Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!
AI机器人
*手眼协同
Active Camera
AC1
AC2
AC Studio
Wiki
数字化激光雷达
车规级
EM4
EMX
E1
机器人
E1R
Airy
Fairy
开发者
AC Studio
快速开始
基础软件与工具包
开源算法
WIKI
技术支持
资源中心
常见问题
售后中心
关于我们
企业介绍
联系我们
新闻中心
加入我们
校园招聘
社会招聘
实习生招聘
天才罗伯特
投资者关系
中
|
EN
预约购买
在线商城
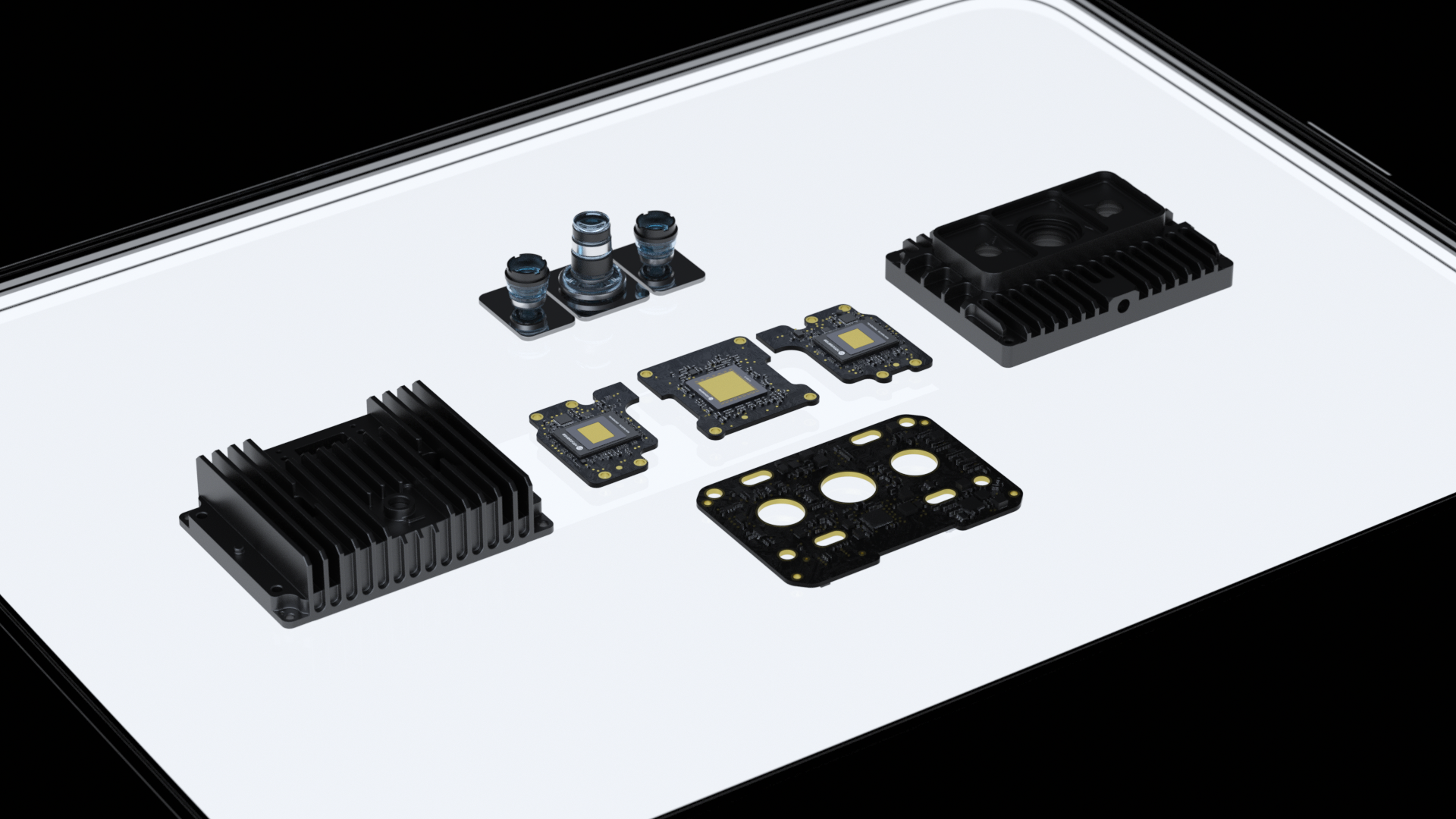
RoboSense自研车规级SPAD-SoC芯片铸就“全球第一”竞争力
2026.01.19
RoboSense
真192线+全局0.1°,EMX定义智能安全新基准
2025.09.29
RoboSense
激光雷达进化论:RoboSense如何持续领跑?
2025.07.22
RoboSense
AEB强制性标准加速落地,激光雷达成为解题关键
2025.05.19
RoboSense
RoboSense赋能Robotaxi伙伴加速商用运营,拓展全球千亿出行市场
2025.05.09
RoboSense
科普|激光雷达会伤害眼睛吗?
2024.11.06
RoboSense
99%的激光雷达厂商都不会告诉你这些点云问题!
2021.02.08
RoboSense
点云质量才是评价激光雷达性能的关键
如何全方位评估一款车规级激光雷达?
2021.01.28
RoboSense
车载激光雷达的五大标准:硬件、点云质量、可靠性、配套功能、功能安全
RoboSense产品购买意向表
非常感谢您对速腾聚创的认可,我们将竭力为您服务!
我们将在24小时内回复您的意向需求,感谢您的支持。
个人信息
机构
*
城市
*
姓名
*
职位
*
手机
*
邮箱
*
购买产品
*
您采购的产品:
您的主要用途:
其它需求及建议
验证码
*
联系方式
1.邮箱:
service@robosense.cn
2.电话:
(+86) 15338772453
您同意接收有关RoboSense新闻和产品的最新更新。您可以查看
隐私政策
取消
提交




 深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋
深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830


