Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!

2019年11月,RoboSense面向RoboTaxi领域,发布了性能极致激光雷达组合的RS-Fusion-P5解决方案。
顶级的激光雷达硬件赋予P5方案像素级的三维成像能力,物体细节清晰可见,车道线、轿车、面包车、泥头车、大货车、小货车等一目了然。

△P5方案实测点云,障碍物及路面细节一幕了然
今天,RoboSense给大家分享全新P5方案的感知算法功能模块以及在各类“中国式”复杂路况下的出色表现。
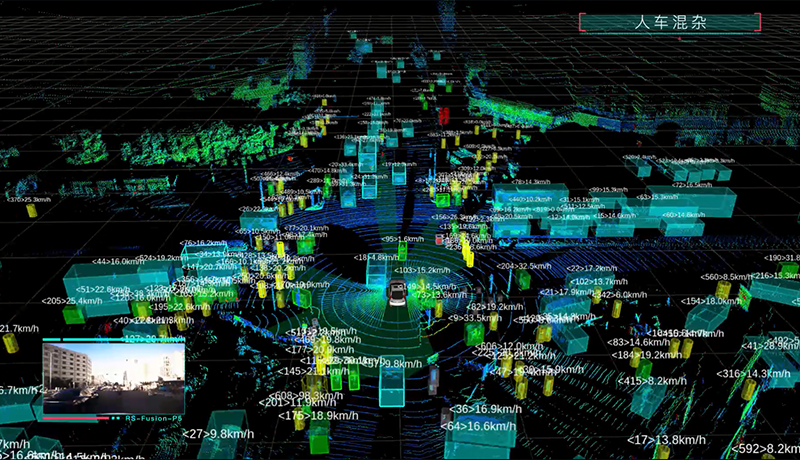
RS-Fusion-P5方案使用RoboSense针对自动驾驶环境感知打造的AI感知算法RS-LiDAR-Algorithms,它凝聚RoboSense团队超10年点云算法技术积累,经历过众多全球合作伙伴在各类驾驶场景的共同验证。

△P5方案实测,人车混杂的城市道路场景
P5方案可以实现精确的地面检测,区分地面点与非地面点,为障碍物检测、路面检测、坑洼处理、可行驶区域检测等打好基础。

△P5方案地面检测,图中地面点云被检测并标记为灰色
障碍物识别、分类、跟踪
P5方案提供全面且准确的障碍物的识别、分类、跟踪,保障自动驾驶在复杂环境中安全行驶。

△P5方案障碍物识别、分类、跟踪,图中用不同颜色区分障碍物类型
距离最近的障碍物往往是构成安全威胁最大的目标,同时也是自动驾驶更关注的障碍物。P5方案中加入了RS-LiDAR-Algorithms的最新功能:一度目标检测(Attention Object),在激光雷达视场范围内,将每一个方向上距离激光雷达最近的障碍物标记为一度目标,包括行人、车辆、护栏、树木、路沿等都可以被标记为一度目标。

△P5方案的一度目标检测,图中一度目标障碍物的识别框线被加粗
基于全面准确的各类环境信息检测,P5方案输出可行驶区域检测信息,为自动驾驶路径规划提供支持。

△P5方案的可行驶区域检测,图中绿色色块区域表示可行驶区域检测

P5方案城市道路场景实测

P5方案人车混杂场景实测

P5方案高速公路场景实测

P5方案稠密车流场景实测
关于RS-Fusion-P5激光雷达感知解决方案的更多信息,欢迎联系相关客户经理或登陆www.robosense.ai/buy填写购买信息。
 深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋
深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830



反舞弊举报邮箱:
voice@robosense.cn