Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!
In the past two years, RoboSense 128-beam mechanical LiDAR RS-Ruby has supported Momenta, IDRIVERPLUS, DeepRoute.ai, AutoX, Mushroom Car Alliance and other RoboTaxi fleets in pilot commercial operations with its powerful and excellent product performance and stable and reliable operation performance, and has been widely deployed and applied.

△ Case:SAIC Mobility x Momenta Robotaxi project


△ Case:IDRIVERPLUS x T3Go
Robotaxi

△ Case:AutoX Robotaxi
On August 1, 2022, the Regulations on the Administration of Intelligent Connected Vehicles in Shenzhen Special Economic Zone (hereinafter referred to as the Regulations) officially came into force. Since then, the commercial operation of L4 autonomous vehicle industry has entered a new stage of regulated and guided development.
However, alongside new development opportunities, the autonomous vehicle industry also faces new challenges - how to further safeguard safety and improve comfort experience in a wider range of open road scene operations. This poses technical challenges for autonomous vehicle companies and higher requirement for LiDAR hardware.
What are the industry requirements for the current high-performance mechanical LiDAR upgrade? In in-depth partnerships with customers in the autonomous vehicle industry, and with years of exploration in the field, RoboSense found that the pain points of the industry have gradually approached the limit of mechanical LiDAR:
1. Can mechanical LiDAR achieve automotive-grade reliability?
2. The perception distance is not far enough; can it exceed 200 meters?
3. How to improve the detection capability of low-reflectivity objects like a black-painted car?
4. Can the length of the detected ground lane line be longer?
……
The “Perfection”(always pursue higher standards)is one of RoboSense's core values. When it is a customer's demand for mechanical LiDAR, creating a mechanical flagship model that touches the theoretical upper limit has led to the birth of RS-Ruby Plus.
Watch:RS-Ruby Plus point cloud in various scenarios
1. Automotive-grade design for reliability as the reference
During the operation of autonomous vehicles, LiDAR’s stability and reliability are as the core of ensuring the safety of autonomous vehicles operation
RoboSense developed a new architecture design for RS-Ruby Plus with reference to automotive-grade standards to ensure that the product passes tens of automotive-grade reliability tests including mechanical shock, random vibration, low temperature operation, high-pressure water impact and EMC.
Watch:RS-Ruby Plus passed dozens of reliability tests
△ RS-Ruby Plus has passed tens of dozens of automotive-grade reliability tests including mechanical shock, random vibration, low temperature operation, high-pressure water impact and EMC
2. Comprehensively improve the perception distance
Perception distance, representing the farthest distance at which the perception algorithm can detect obstacles in the lidar point cloud, can be said to be the core requirement for the performance of the LiDAR for autonomous vehicles.
The angular resolution refers to the angle between scanner beams. If the same obstacle is detected by LiDAR with the same angular resolution, the farther the obstacle is from the LiDAR, the fewer points will be reflected.
To increase the number of points reflected from distant obstacles, LiDAR needs to improve both the detection range and the angular resolution.
RS-Ruby Plus upgrade key point #1:
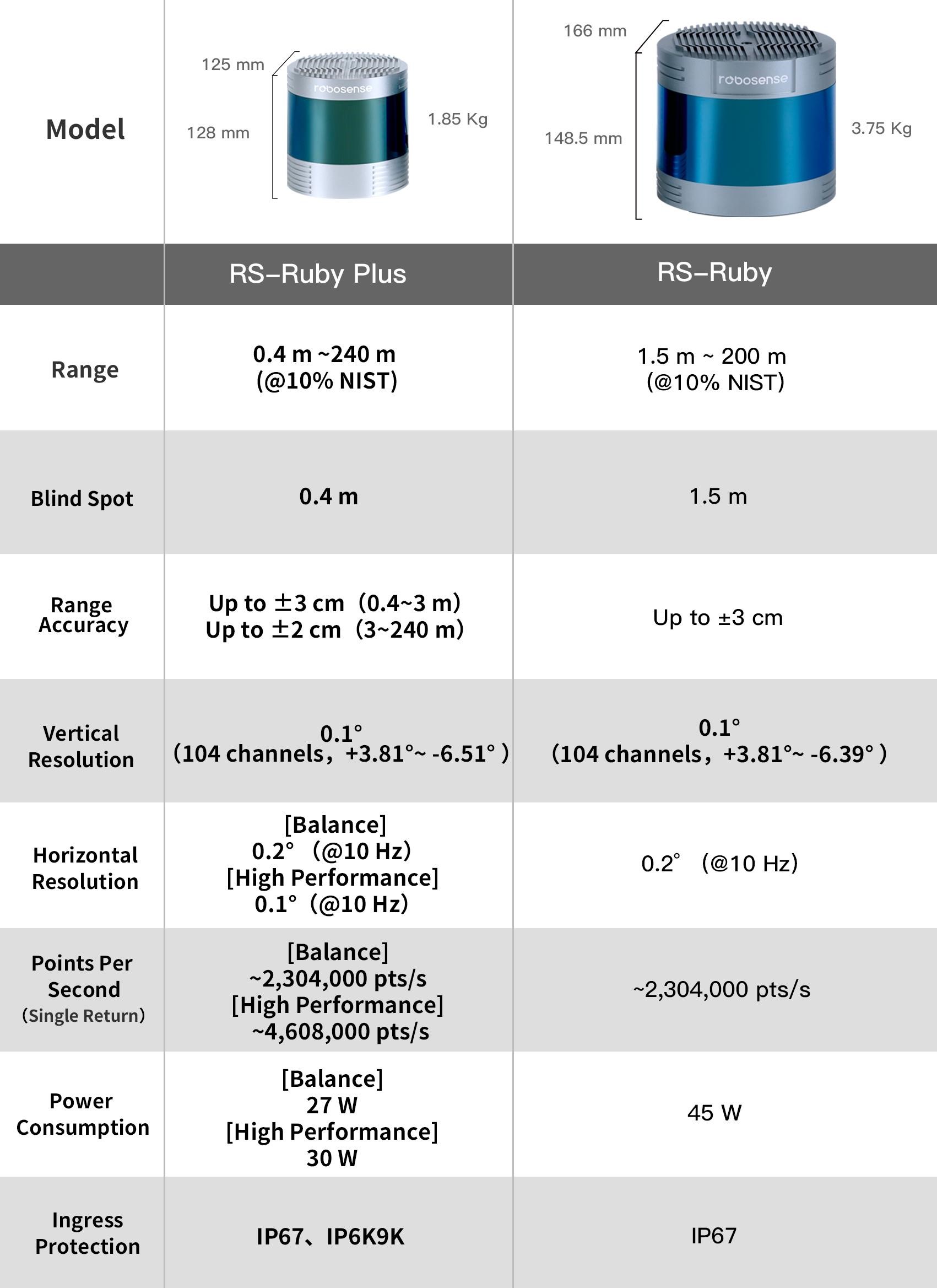
200m→240m (@10% NIST standard reflectivity), greatly improving the black vehicle detection capability.
Since 2018, the detection range of multi-beam mechanical LiDAR has remained at 200m @10% reflectivity, which seemed to be the upper limit of the 905nm solutions.
However, RoboSense found that the detection range potential of the 905nm LiDAR is far more than this on the premise of ensured safety of human eyes.
In the RS-Ruby Plus product project, RoboSense R&D team achieved a breakthrough in the detection range of 905nm LiDAR. The product reached a super detection range of 240m @10% standard reflectivity (under 100,000 Lux sunlight environment) and the overall detection range performance improved by 20%, outperforming its peers.
△ RS-Ruby Plus detection range of 240m @10% standard reflectivity
RS-Ruby Plus upgrade key point #2:
0.1°x0.1° angular resolution; significantly increased number of points from obstacles.
At
the same time, RS-Ruby Plus maintains the 0.1° vertical angle resolution of the
previous generation RS-Ruby, which still leads in the mechanical LiDAR
industry: 104 channels 0.1° vertical resolution, including 32 channels 240m
@10% ultra-long detection range, are accurately arranged in the -6.39° ~ +
3.81° area of the vertical FoV.
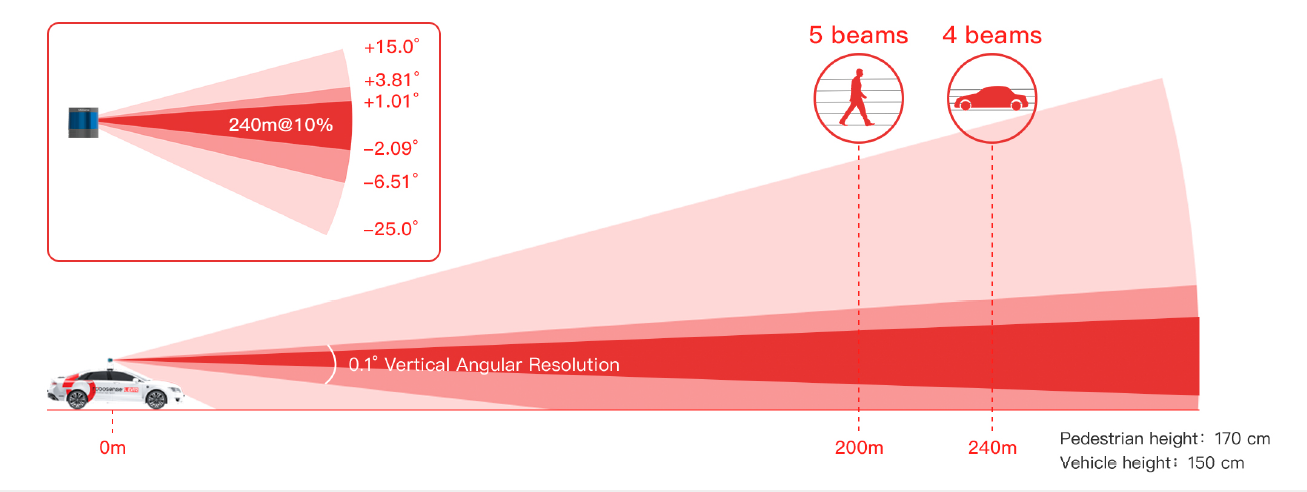
△ The detection range of 32 channels of obstacles facing forward within the range of -2.094° ~ +1.012° in the vertical FoV of RS-Ruby Plus is set to be 240m @10% reflectivity; 104 0.1° vertical resolution channels are accurately arranged in the middle of the vertical FoV angle (- 6.39° ~ + 3.81°).
In this way, RS-Ruby Plus reaches an angular resolution of 0.1°x0.1° in high-performance mode. LiDAR points generated reaches 4,608,000 pts/s (single return), more than 30% higher than that of similar products. With the super detection range of 240m @10% reflectivity, RS-Ruby Plus captures abundant point cloud information from detection of distant obstacles.
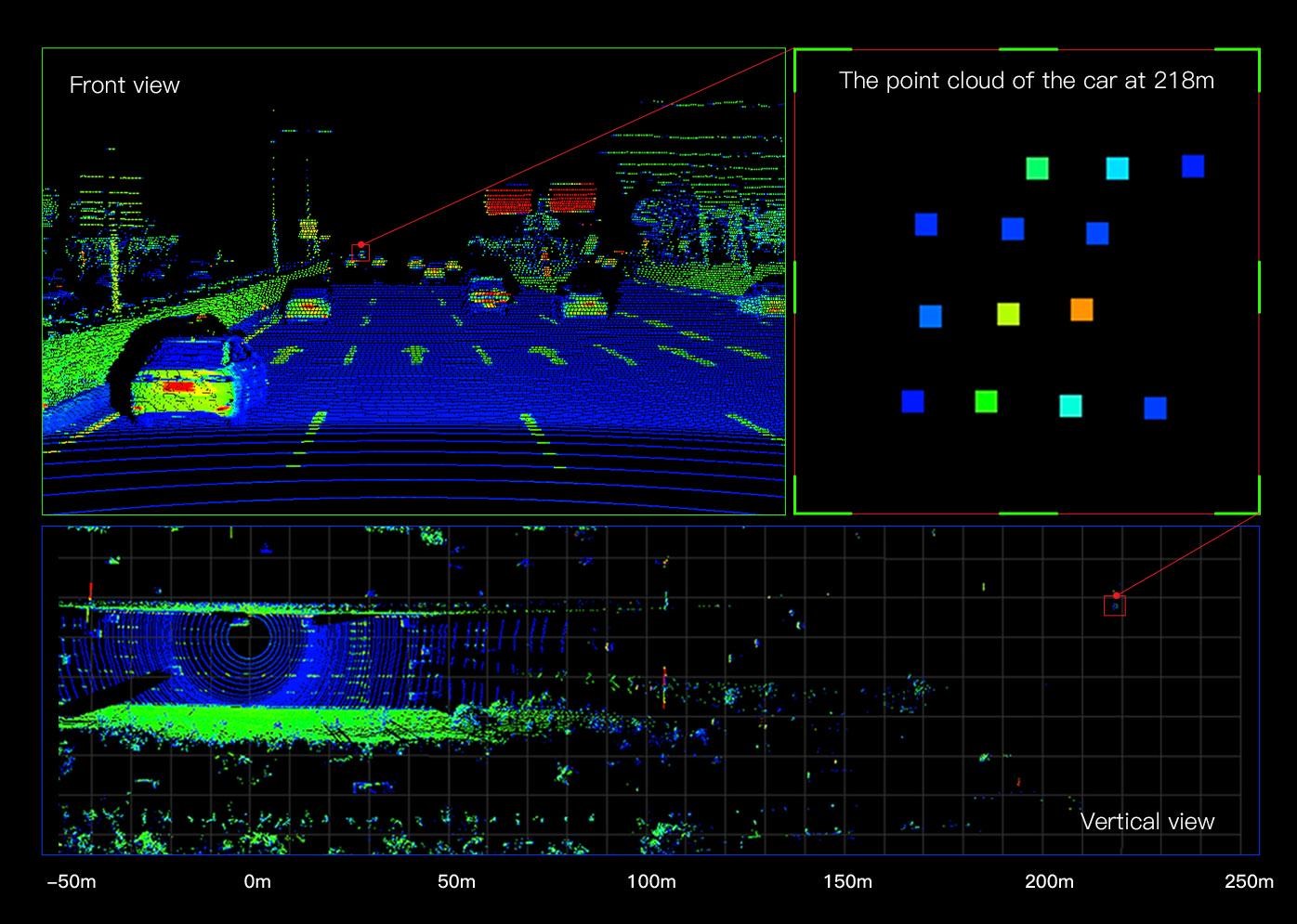
△ RS-Ruby Plus detects cars at 218 meters: 4 lines, 13 points
3. Detection capability of black-painted vehicles boosted
Black-painted vehicles are typical low-reflectivity obstacles. Detection of distant black vehicles is a classic “Corner Case” that tests the detection range of LiDAR.
Assuming a LiDAR has a resolution of 0.125°x0.1° and a detection range of 200m @10% reflectivity, when it detects white and black cars of the same size at 200m, generally, 5-7 points would be reflected from a white car, while only 3-6 points would be reflected from a black one. There may be no point reflected from black cars coated with certain special car paints.
However, the mainstream perception algorithms need at least 5 points to detect and identify obstacles stably, which means the perception result of this assumed LiDAR for distant black car may lead to detection failure or error.
Empowered by the super detection range capability, and with 0.1°x0.1° ultra-high resolution, RS-Ruby Plus receives up to 6-10 points from black vehicles at 200 meters, greatly improving the detection and recognition capabilities of perception algorithms for black vehicles.
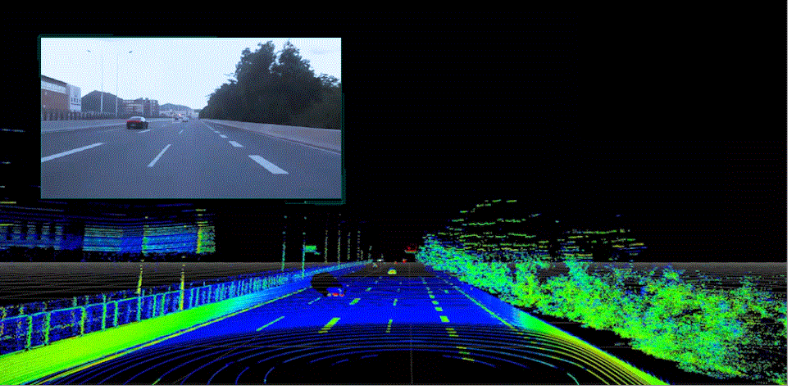
△ RS-Ruby Plus stably detects 85-90 meters
As shown in the above point cloud diagram, the road line detection capability of RS-Ruby Plus has been improved as well.
Compared with the previous generation, RS-Ruby, which detects 70-75 meters of road lane lines, RS-Ruby Plus stably detects 85-90 meters, enabling autonomous vehicles to perceive lane changes faster, earlier and more accurately, thus further improving the safety and user experience of autonomous vehicles when changing lanes and going up and down ramps.
4. Higher accuracy and finer imaging
The higher the accuracy of LiDAR, the more precise and clear the shape of small objects like stone piers, lampposts and traffic cones can be restored.
In a complex traffic scene, the clearer the shape of the obstacles in the point cloud, the easier and faster the autonomous vehicle can identify and distinguish them.
Detection range accuracy improvement of RS-Ruby Plus:
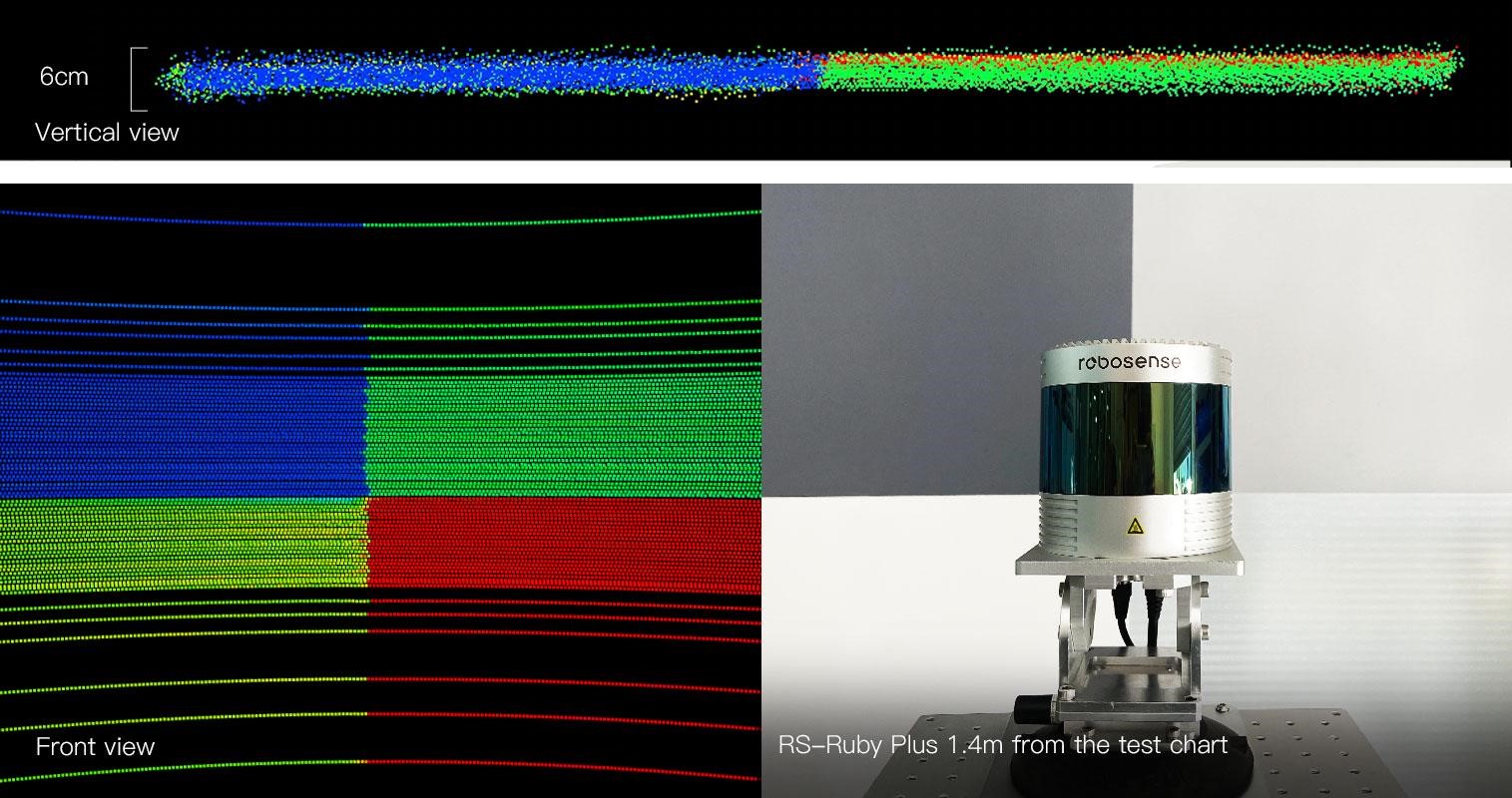
△ RS-Ruby Plus detects the “four color” reflectance plate (10%, 50%, 90%, high-reflectivity) at 1.4m, and the point cloud thickness is about 6.6cm (the thinner the point cloud, the higher the accuracy)
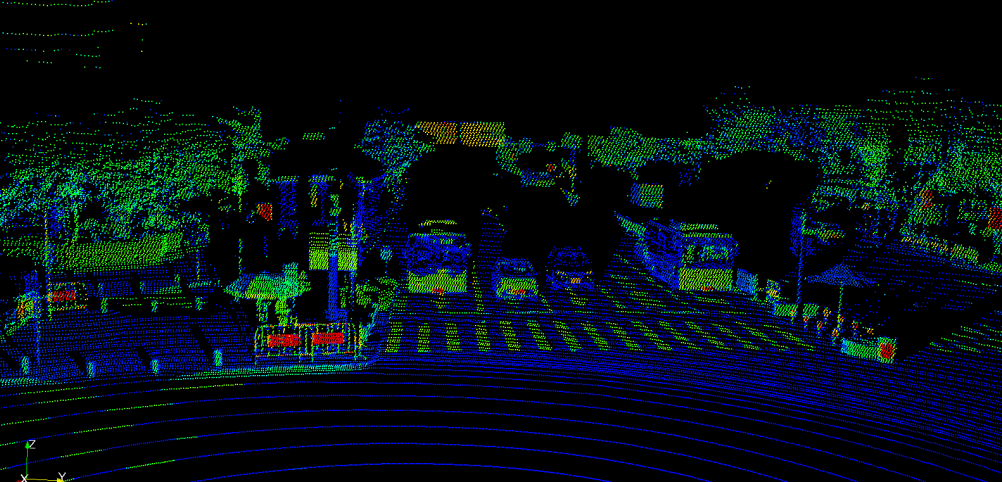
△ RS-Ruby Plus real-time point cloud, showing clear outline details of stone piers, mobile guardrails, lampposts and other obstacles on both sides of the road
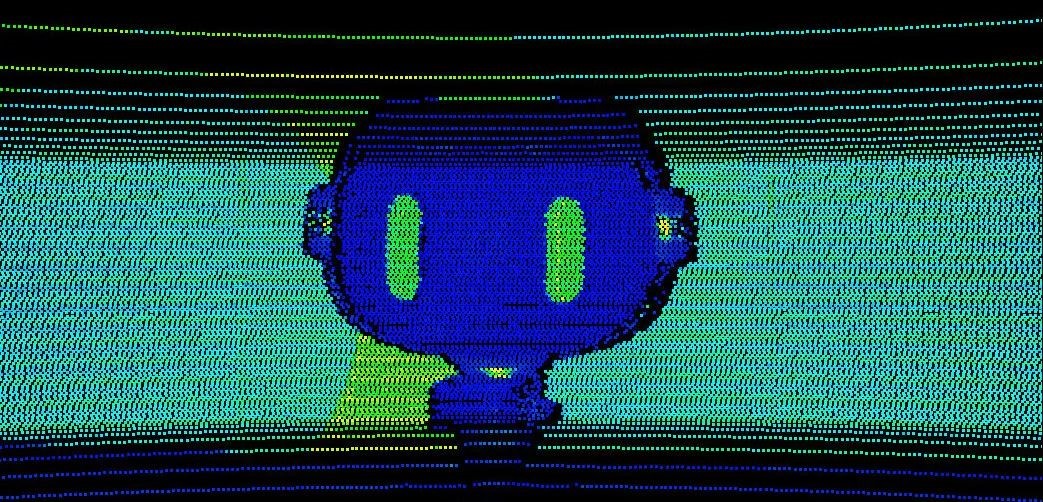
△ Suxiaoteng (RoboSense mascot) in RS-Ruby Plus high-precision point cloud
5. Comprehensive anti-interference
RS-Ruby Plus uses the latest laser encryption technology, which generates a difference key for every transmission.
With an advanced opto-mechanical system, RS-Ruby Plus effectively resists interference from other LiDARs and ambient light and sunlight (100,000 Lux lighting).

△ On the top: original point cloud of RS-Ruby Plus in face of multi-LiDAR interference;On the bottom: point cloud of LiDAR without anti-interference capability in face of multi-LiDAR interference
6. Automotive Ethernet Ethernet, gPTP, PTP
RS-Ruby Plus has an automotive Ethernet Ethernet interface. The product supports both GPS synchronization and network synchronization (PTP and gPTP time synchronization) protocols, which greatly reduces data transmission delay and simplifies cable layout.
Since its establishment, RoboSense has been offering leading product technologies that serve market demands to promote the development of the autonomous vehicle industry.
If the Regulations paved the way for the commercial operation of L4 autonomous vehicles at the legal level, RS-Ruby Plus provides a highly safe and reliable “eye” for autonomous vehicles.
RoboSense will always focus on customer needs, break through technical limits, innovate and explore new frontiers in the LiDAR industry. The company will constantly offer products that better cater to the market needs, employ more advanced technology innovations and feature ever superior performance to empower industry partners, support the comprehensive commercialization of autonomous driving technologies and contribute to the arrival of a smart era enabled by autonomous driving technologies.
About RoboSense
Founded in 2014, RoboSense (Suteng Innovation Technology Co., Ltd.) is the leading LiDAR company of Smart LiDAR Sensor Systems incorporating LiDAR sensors, AI algorithms and IC chipsets, that transform conventional 3D LiDAR sensors to full data analysis and comprehension systems. The company’s mission is to possess outstanding hardware and artificial intelligence capabilities to provide smart solutions that enable robots (including autonomous vehicles) to have perception capability more superior to humans.
https://www.robosense.cn/en
 Building 9, Block 2, Zhongguan Honghualing Industry Southern District, 1213 Liuxian Avenue, Taoyuan Street, Nanshan District, Shenzhen, China
Building 9, Block 2, Zhongguan Honghualing Industry Southern District, 1213 Liuxian Avenue, Taoyuan Street, Nanshan District, Shenzhen, China service@robosense.cn
service@robosense.cn 0755-8632583046057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai
0755-8632583046057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai





